ΕΝΗΜΕΡΩΣΗ
ΝΕΑ

19 Ιούλιος, 2016
Summer DLAB 2015. RED
Το InFlux αποτελεί το τελικό πρωτότυπο του προγράμματος ΑΑ Summer DLAB που έλαβε χώρα το 2015 στο Λονδίνο στην βάση της AA και στις εγκαταστάσεις του πάρκου Hooke κατά τη διάρκεια του Ιουλίου 27 με Αύγουστο 14, 2015.
Το InFlux είναι το αποτέλεσμα μιας έρευνας σχετικά με την δημιουργία και κατασκευή μέσω της ενσωμάτωσης παραγωγικών τεχνικών ρομποτικής και σχεδιασμού μιας πολύπλοκης γεωμετρίας η οποία χαρακτηρίζεται από διπλή καμπυλότητα. Η έρευνα γύρω από την συμπεριφορά του σκυροδέματος η οποία ξεκίνησε το 2014 έχει αναπτυχθεί κατά τη διάρκεια του κύκλου του 2015 με περαιτέρω εξερευνήσεις που συνδέουν τη γεωμετρία με τα υλικά, και τη δομή. Πραγματοποιημένο ως ένα τοιχίο με ύψος 2,2 μέτρα, 4 μέτρα πλάτος, και ένα κυμαινόμενο βάθος από 3 έως 25 εκατοστά, το InFlux αναπτύχθηκε, κατασκευάστηκε και ολοκληρώθηκε σε 7 ημέρες.
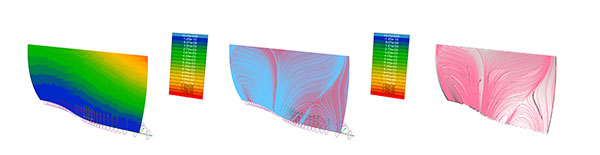
Ανάλυση FEA και απεικόνιση γραμμών ροής φορτίων που δημιουργείται στο Karamba.
Αρχικά πειράματα μορφοποίησης επικεντρώθηκαν στην επεξεργασία μίας κάθετης επίπεδης επιφάνειας με στόχο τη δημιουργία μίας μορφής διαφόρων βαθμών καμπυλότητας μέσα από μια σειρά από υπολογιστικές τεχνικές. Βασικές σχεδιαστικές παράμετροι σε αυτή τη φάση περιελαμβάνουν την κατανομή των ανοιγμάτων και των τοπικών σημείων καμπυλότητας με διαφορετικές τιμές οι οποίες απορρέουν από την γενικότερη μορφολογία του τοιχίου. Η προσέγγιση μοντελοποίησης με boids χρησιμοποιήθηκε στα πειράματα μορφοποίησης, όπου δημιουργήθηκε ένα εξειδικευμένο εργαλείο σχεδιασμού μέσω του open-source προγράμματος κωδικοποίησης Processing. Με το εργαλείο αυτό έγινε εφικτή η διαχείριση της γεωμετρίας τύπου mesh και η αναπροσαρμογή της ως προς τον κάθετο άξονα Ζ. Ο στόχος του δεύτερου σετ υπολογιστικών πειραμάτων ήταν η ενσωμάτωση των εργαλείων δομικής ανάλυσης από την αρχή των εξερευνήσεων του σχεδιασμού προκειμένου να βελτιωθεί η γενικότερη μορφολογία του τοιχίου ως προς την δομική του απόδοση. Μια αρχική γεωμετρία τύπου mesh αξιολογήθηκε ως προς το ίδιο το βάρος του τοιχίου μέσω ανάλυσης πεπερασμένων στοιχείων (FEA) χρησιμοποιώντας το Grasshopper add-on πρόγραμμα Karamba και θέτοντας τη δομή ως κέλυφος, με το υλικό να έχει τις ιδιότητες του σκυροδέματος υψηλής αντοχής (C90 / 105). Με την απεικόνιση των γραμμών φυγής δυνάμεων του Karamba επιτεύχθηκε η μη παρέμβαση των ανοιγμάτων του τοιχίου στη μεταφορά φορτίων στο συνολική γεωμετρία. Το αποτέλεσμα της ανάλυσης πεπερασμένων στοιχείων ήταν η δημιουργία μίας κατασκευής σκυροδέματος βάθους 5 εκατοστών με ανοίγματα τα οποία ακολουθούν την κατεύθυνση της ροής των φορτίων του τοιχίου.
Το επόμενο στάδιο στη διαδικασία του υπολογιστικού σχεδιασμού συμπεριλαμβάνει τη δημιουργία γεωμετριών διπλής καμπυλότητας με το αρχικό μοντέλο του κελύφους ως σημείο έναρξης. Η έρευνα αυτή εστιάζει ταυτόχρονα στις στατικές επιδόσεις καθώς και τις ρομποτικές τεχνικές φρεζαρίσματος. Το εξειδικευμένο εργαλείο σχεδιασμού στο Processing αναπτύσσεται περαιτέρω ως ένας συνδυασμός προσομοίωσης στοιχείων boid με τεχνικές «χαλάρωσης», αναπροσαρμογής της γεωμετρίας mesh με σκοπό τη δημιουργία μιας διπλά κυρτούς μορφής που αυξάνει σε πυκνότητα προς το κάτω τμήμα του τοιχίου. Μετά την ενσωμάτωση των ανοιγμάτων, το γεωμετρικό πλέγμα με τις αντίστοιχες γραμμές φορτίων εισαγάγεται στο Processing για την δημιουργία σύνθετων καμπύλων μορφών. Το σύστημα boids επηρεάζει την γεωμετρική καμπυλότητα τοπικά σε ολόκληρη την επιφάνεια του InFlux κατά μήκος των γραμμών ροής φορτίων ακολουθώντας τους κανόνες γειτνίασης και συμπεριφοράς σμήνους.
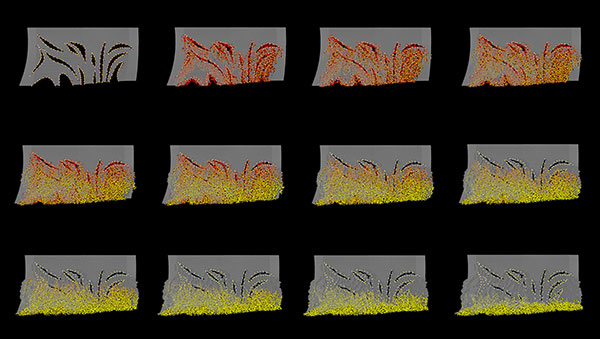
Προσαρμοσμένο εργαλείο που αναπτύχθηκε στο Processing, διαδικασία «χαλάρωσης» του γεωμετρικού πλέγματος σύμφωνα με τοπικά δεδομένα.
Οι τεχνικές ρομποτικής στον σχεδιασμό επιτρέπουν την αποστασιοποίηση από το απόλυτο φαινόμενο του «από-τον-σχεδιασμό-στην-κατασκευή», όπου το τελικό αποτέλεσμα είναι προκαθορισμένο και η κατασκευή προσφέρεται μόνο ως «μέσο επίτευξης ενός σκοπού». Η δημιουργία της διαδρομής του ρομποτικού βραχίονα χρησιμεύει ως μια άμεση οπτική σύνδεση μεταξύ της γενικότερης μορφολογίας του πρότυπου και τοπικών σημείων ειδικής διαμόρφωσης της γεωμετρικής επιφάνειας. Ως εκ τούτου, η απόληξη του ρομποτικού χεριού παίζει κρίσιμο ρόλο ως εργαλείο σχεδιασμού στην παραγωγή τοπικών υφών με βάση τη γενική διαμόρφωση.
Για το υλικό καλουπιού σκυροδέτησης, η αντιπυρική σανίδα διογκωμένης πολυστερίνης (EPS) έχει επιλεχθεί με χαρακτηριστικά μέσης πυκνότητας (30g / l), καθώς προσφέρει καλή αντοχή και ταχύητητα στη διαδικασία φρεζαρίσματος με τον ρομποτικό βραχίωνα. Η διάσταση της κάθε σανίδας EPS είναι 200 εκατοστά σε μήκος, 125 εκατοστά σε ύψος, και 50 εκατοστά σε βάθος, ενώ ο συνολικός αριθμός σανίδων EPS που χρησιμοποιήθηκε ήταν 8.
Η απόληξη του ρομποτικού χεριού χρησιμεύει ως ένα μέσο σχεδιασμού που βοηθά στην παραγωγή της επιφανειακής υφής των σανίδων αφρου EPS. Μετά την ολοκλήρωση της διαδικασίας φρεζαρίσματος, οι επιφάνειες που θα έρθουν σε επαφή με το σκυρόδεμα έχουν επικαλυφθεί με ένα μίγμα σιλικόνης και χημικού παράγοντα για την διευκόλυνση του ξεκαλουπώματος. Είναι σημαντικό να σημειωθεί ότι η δομή είναι κατασκευασμένη από ένα ειδικό μίγμα σκυροδέματος με πρόσθετες πολυεστερικές ίνες η οποία επέτρεψε την σκυροδέτηση σε μια περίοδο μερικών μόνο ωρών, χωρίς να περιορίζεται από τους περιορισμούς της εφαρμογής συμβατικών συστημάτων ενίσχυσης όπως η χρήση ράβδων οπλισμού. Η μόνη περίπτωση χρήσης ράβδων οπλισμού στο τελικό στάδιο κατασκευής είναι κατά μήκος της θεμελίωσης του τοίχου, που φέρει ένα βάθος 30 εκατοστών. Τα τελικά στάδια συναρμολόγησης συμπεριλαμβάνουν τη χύτευση ταχύπηκτου τσιμέντου στο καλούπι από τις σανίδες αφρού EPS, η οποία ακολουθείται από το χρόνο σκλήρυνσης των περίπου 12 ωρών. Με διαστάσεις 2,2 μέτρα ύψους, 4 μέτρα πλάτους, και ένα κυμαινόμενο βάθος 30 έως 250 χιλιοστών, η τελική ανέργεση του περίπτερου τοιχίου αναπτύχθηκε και ολοκληρώθηκε σε 7 ημέρες.
Κατά τη διάρκεια των διαδικασιών σχεδιασμού, κατασκευής και συναρμολόγησης, οι διαδραστικές συσχετίσεις μεταξύ των διαφορετικών λογισμικών προσομοίωσης ήταν ένας βασικός οδηγός για την αναγνώριση μεθόδων ενσωμάτωσης των αρχιτεκτονικών κριτηρίων με τη δομική απόδοση του περιπτέρου. Εν κατακλείδι, η έρευνα έχει ως στόχο να τονίσει τις αρχιτεκτονικές δυνατότητες χρήσης σκυροδέματος με ένα μη συμβατικό τρόπο, με περιορισμένους πόρους και χρονική περίοδο, δημιουργώντας ισχυρές συσχετίσεις μεταξύ υπολογιστικών μεθόδων σχεδιασμού και διαδικασιών ψηφιακής κατασκευής.
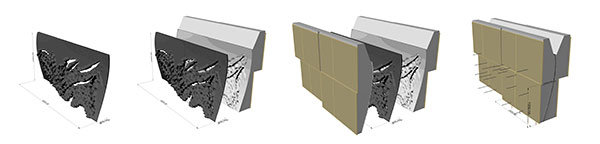
Αλγοριθμική παραγωγή των δεδομένων της φόρμας του καλουπιού για την σκυροδέτηση.
Τεχνικές λεπτομέρειες
21 ημέρες :: Διάρκεια του προγράμματος
7 ημέρες :: Σχεδιαστική εξέλιξη, κατασκευή, συναρμολόγηση
18 μαθητές :: 11 εθνικότητες
1080 ώρες :: Χρόνος κατασκευής, συναρμολόγησης, αποσυναρμολόγησης
0.75 m3 :: σκυρόδεμα υψηλής αντοχής
8 m3 :: σανίδες πολυστερόνης EPS
Του Αλέξανδρου Καλλέγια και της Elif Erdine

(Αριστερά) Ρομποτική εγκατάσταση, (Δεξιά) Ρομποτικό φρεζάρισμα πολυστερίνης EPS.
Λίστα συντελεστών
Διεύθυνση Προγράμματος Αλέξανδρος Καλλέγιας, Elif Erdine
Διδάσκοντες Αλέξανδρος Καλλέγιας, Elif Erdine, Daghan Cam, Angel Fernando Lara Moreira
Μαθητές Lorenzo Pellegrini, Jackson Lindsay, Xiaoxiang Li, Matthew Eng, Angelo Figliola, Nicolo Cernigliaro, Jos van Roosmalen, Αρετή Σανούδου-Δραμαλιώτη, Julian Heinen, Mathias Paul Reisigl, Σταυρούλα Κακαλέτση, Pallavi Gupta, Vikas Sharma, Emine Ece Emanetoglu, Leo Claudius Bieling, Florian Kaiser, Jin Li
Ρομποτική ρύθμιση Pradeep Devadass
http://summerdlab.aaschool.ac.uk/
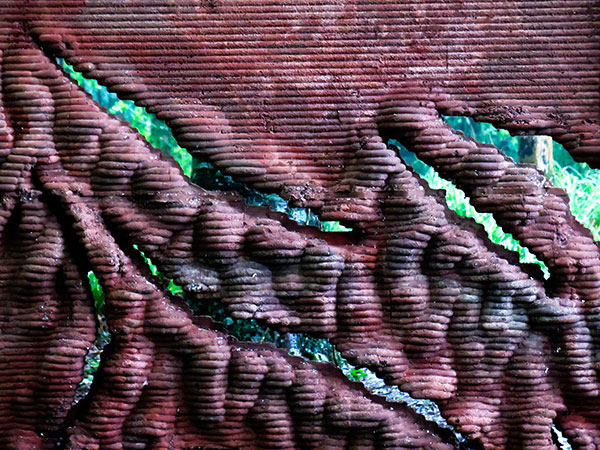
InFlux, λήψη εικόνας λεπτομέρειας.

InFlux, λήψη γενικής εικόνας.

Ρομποτικό φρεζάρισμα πολυστερίνης EPS.